DEVINE
latest
Architecture
Distributed Computing
Image Pipeline
UML Sequence Diagrams
Start Game
Play Game
End of Game
Getting Started
Audio
Bodytracking
Dashboard
Depth mask
Feature extraction
GuessWhat
Head Coordinator
Image disptacher
Robot Behavior
Segmentation
Video
Tests
ROS Cheat Sheet
DEVINE
Docs
»
Architecture
»
UML Sequence Diagrams
Edit on GitHub
UML Sequence Diagrams
¶
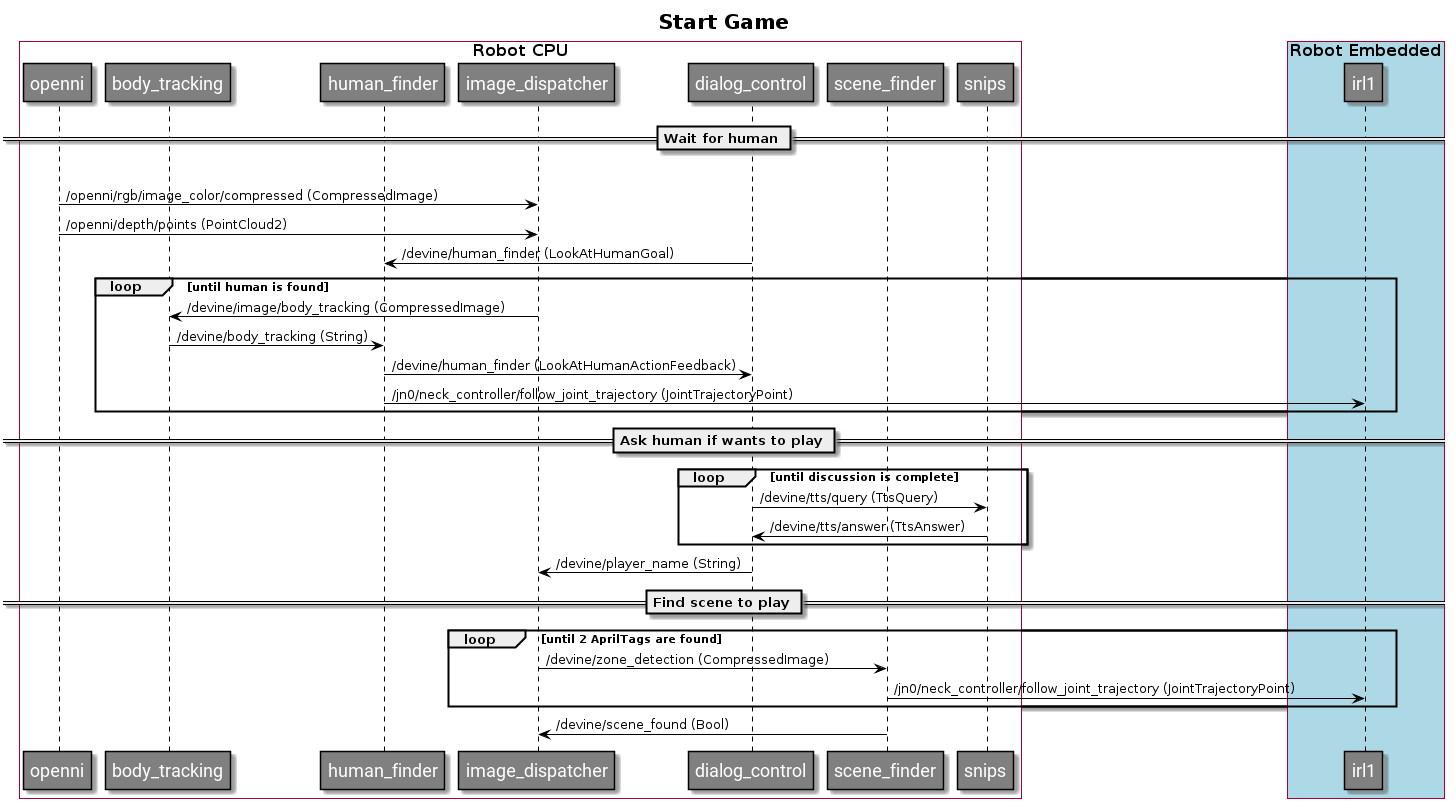
Start Game
¶
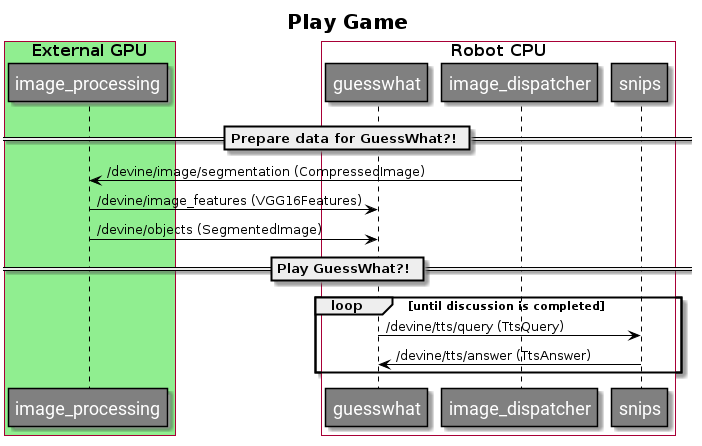
Play Game
¶
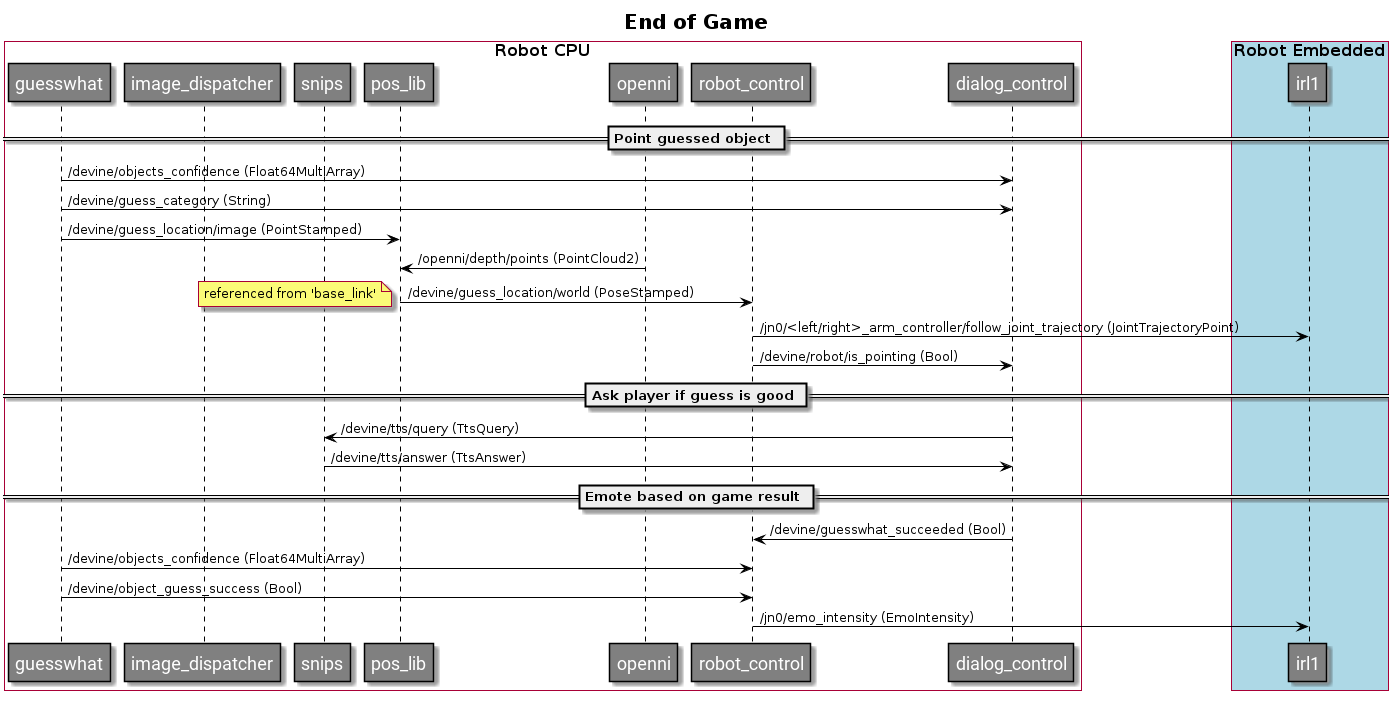
End of Game
¶